
こんにちは。
今回はAirCraft2024年の操縦基板を紹介いたします。
AirCraftの基板製作は、JLCPCB様にスポンサード頂いております。
さて、それでは基板の完成品を見ていきましょう。
AirCraft2024の電装班はあまり複雑な基盤を設計する技量はないので、このようなスルーホールのモジュールを組み合わせた基盤がほとんどです。
実装部品は以下になります。
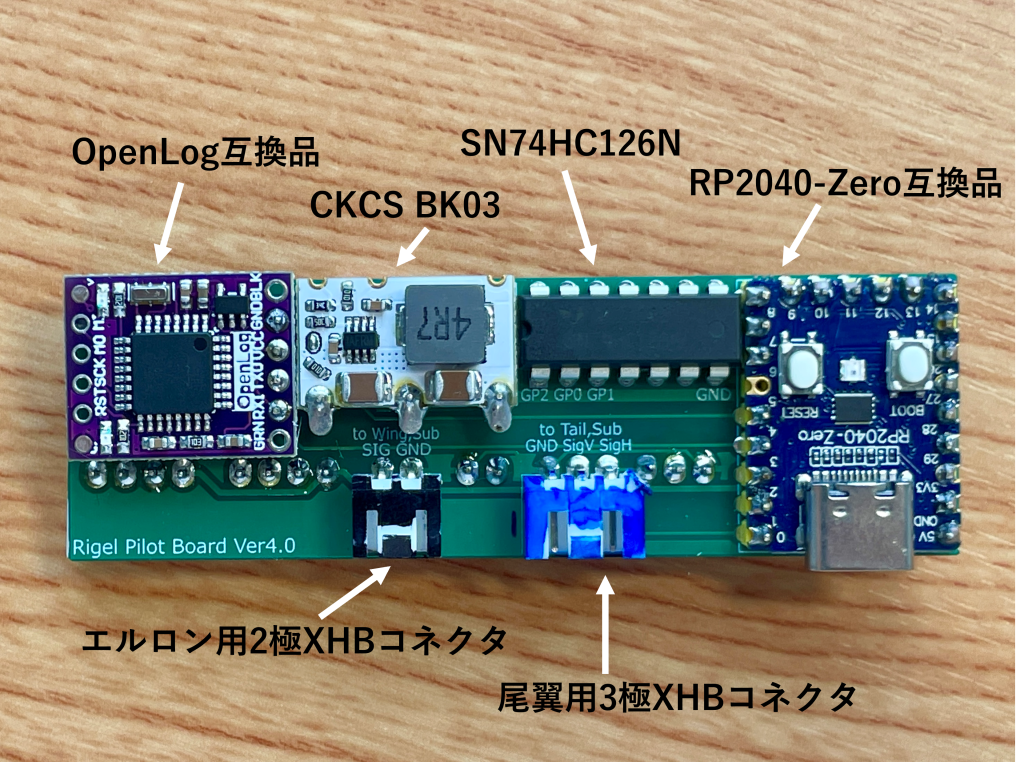
・RP2040-Zero互換品
・SN74HC126N
・CKCS BK03
・OpenLog互換品
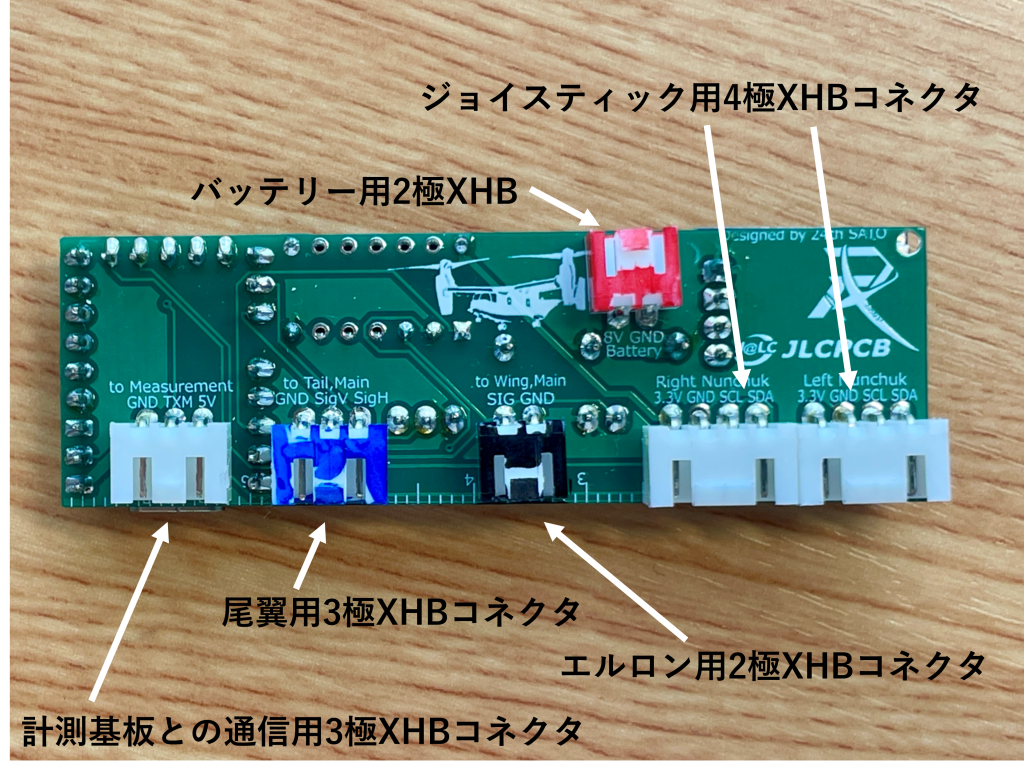
・バッテリー用2極XHBコネクタ
・エルロン用2極XHBコネクタ ×2
・尾翼用3極XHBコネクタ ×2
・ジョイスティック用4極XHBコネクタ ×2
・計測基板との通信用3極XHBコネクタ
基板はKiCadで設計しています。回路図は以下のようになっています。
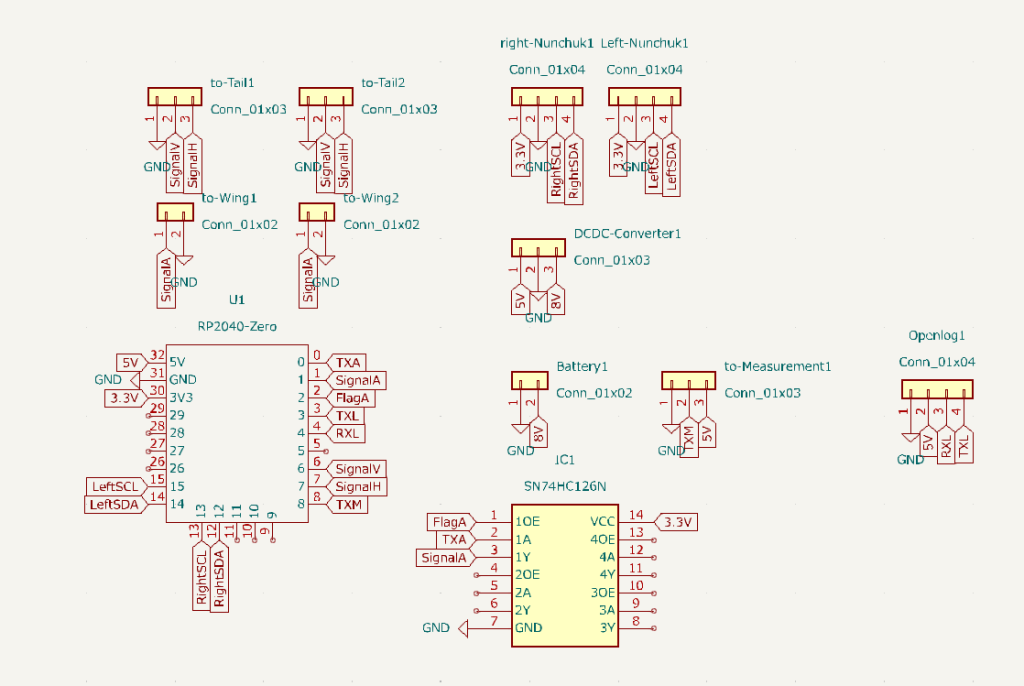
部品について1つずつ説明していきます。
・RP2040-Zero互換品
操縦系統の処理をしているマイコンボードです。Raspberry Pi Picoと同じマイコンチップRP2040を搭載しています。ピンの数が程よいので、RP2040搭載のマイコンボードを使いたい場合はこれがおすすめです。Aliexpressで1個300円以下で買えるのも気に入っています。
・SN74HC126N
バスバッファゲートという、受信と送信の切り替えを行うことができるモジュールです。エルロンで使用している、Hiwonder製のLX-824というサーボモータのフィードバック値を取得するために使っています。
・CKCS BK03
DCDCコンバータ、変圧器です。2セルのLipoバッテリーから5Vを作って、マイコン等に電力供給しています。
・OpenLog互換品
UART通信でデータを送るだけでログが取れる便利なモジュールです。操縦基板のデータは計測基板に送ってそちらでもまとめてログを取っていますが、予備として操縦基板でもログを取っています。
・バッテリー用2極XHBコネクタ
今年はXHコネクタのロック付きバージョンの、XHBコネクタを多用しています。
・エルロン用2極XHBコネクタ ×2
エルロン用サーボのLX-824はUART通信で制御することができます。先述のSN74HC126Nを使うことで、TX、RXを1本の導線で通信することができますので、2極の内訳はTX兼RXの信号線と、GNDとなっています。”×2”というのは、AirCraftでは伝統的に断線に備えた冗長性を高めるため、操縦系統の一部のワイヤーを2組装備するようにしているからです。ノイズが増えるのでは?という懸念もありますが、現在までに不具合は発生していないので、今年もそのような構成となっています。
・尾翼用3極XHBコネクタ ×2
ラダー、エレベーター用のサーボはどちらも、Futaba製のHPS-A700を使用しています。エルロン用サーボとは違い2種類のPWM信号を伝える必要があるので、信号線とGNDの3極となっています。エルロンと同じく、同じ役割のワイヤーを2組用意しているので”×2″となっています。
・ジョイスティック用4極XHBコネクタ ×2
パイロットからの入力を受け付けるジョイスティックは、任天堂のWiiコントローラー ヌンチャクを改造したものを2つ(右手用と左手用)使用しています。I2C通信で受信できるので、4極の内訳は3.3V、GND、SCL、SDAとなっています。
・計測基板との通信用3極XHBコネクタ
計測基板にエルロン用サーボからのフィードバックデータや操舵入力のデータを、UART通信で送信するためのコネクタです。計測基板への電源供給もこのコネクタから行っています。
KiCadのPCBエディターは以下のようになっています。
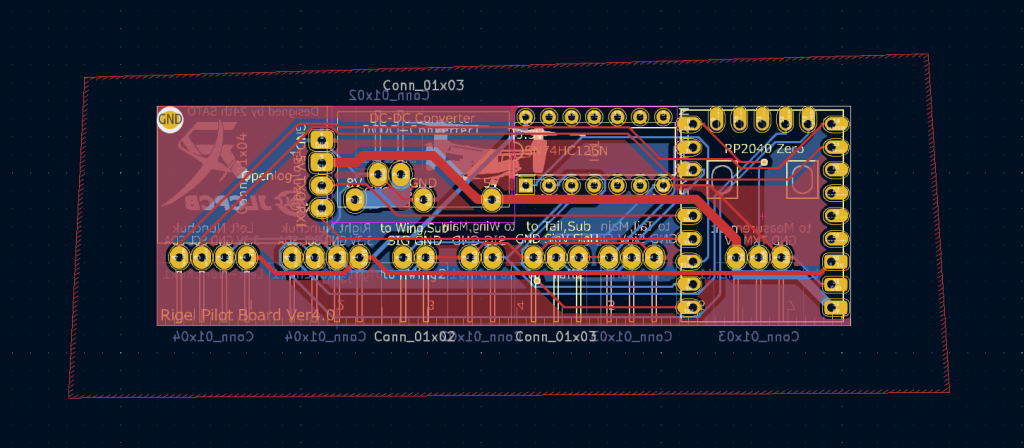
こだわりポイントは、以下です。
・大きな電流が流れそうな配線は太くする
・一部のモジュールを裏側に配置して基板をできるだけ小さくする
・コネクタとピンの役割を記載して、何も知らない人が見ても分かるようにする
・定規の目盛りとキーホルダー用の穴を空けて、基板が余っても使い道があるようにする
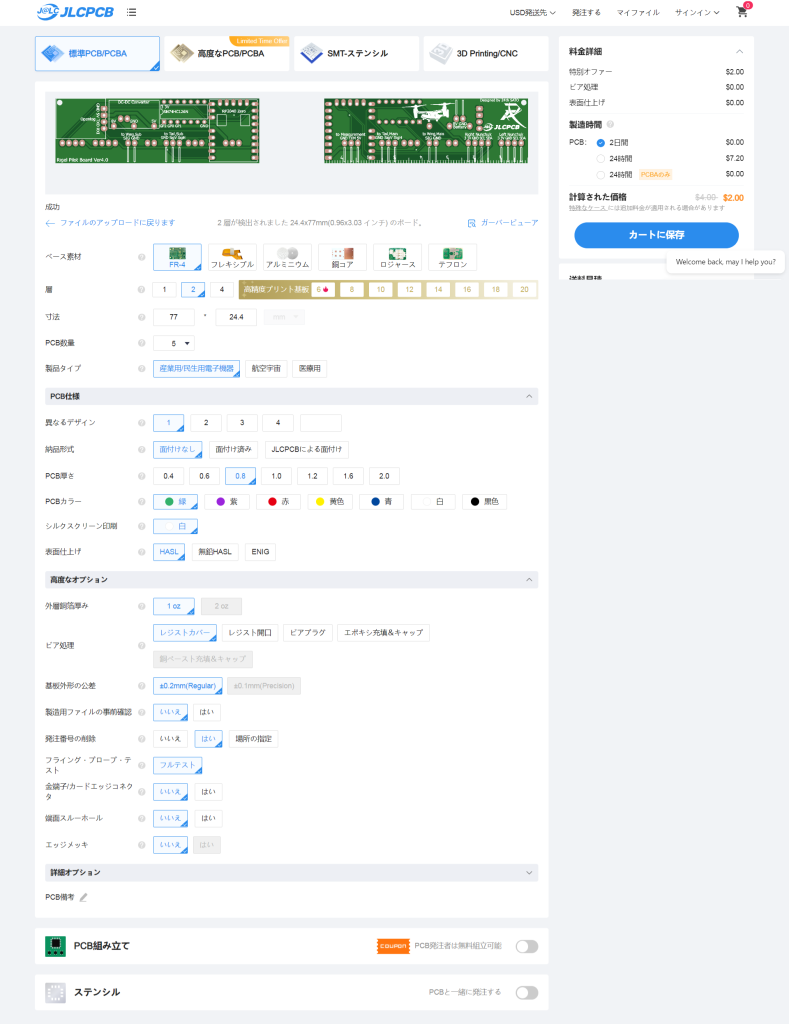
JLCPCBの発注画面での設定は「PCB厚さ→0.8mm」、「発注番号の削除→はい」としています。
それでは以上、今回はAirCraft2024の操縦基板を紹介しました。
参考になれば幸いです。
